
Sastav
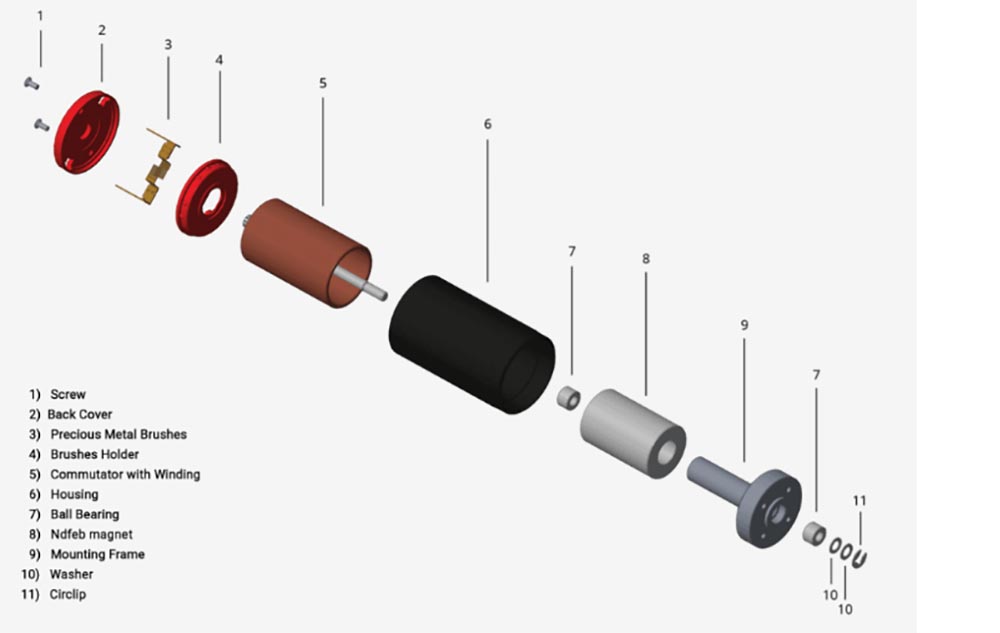
1. Motor sa stalnim magnetom istosmjerne struje:
Sastoji se od statorskih polova, rotora, četkica, kućišta itd.
Statorski polovi su napravljeni od permanentnih magneta (čelik za permanentne magnete), ferita, alnika, neodimijuma, željeza, bora i drugih materijala. Prema strukturnom obliku, mogu se podijeliti na nekoliko tipova, kao što su cilindrični i pločicasti.
Rotor je uglavnom izrađen od laminiranih silicijumskih čeličnih limova, a emajlirana žica je namotana između dva utora jezgre rotora (postoje tri namotaja u tri utora), a spojevi su zavareni na metalnim limovima komutatora.
Četkica je provodni dio koji povezuje napajanje i namotaj rotora, te ima dva svojstva: provodljivost i otpornost na habanje. Četkice motora sa permanentnim magnetima koriste jednostruke metalne ploče ili metalne grafitne četkice, te elektrohemijske grafitne četkice.
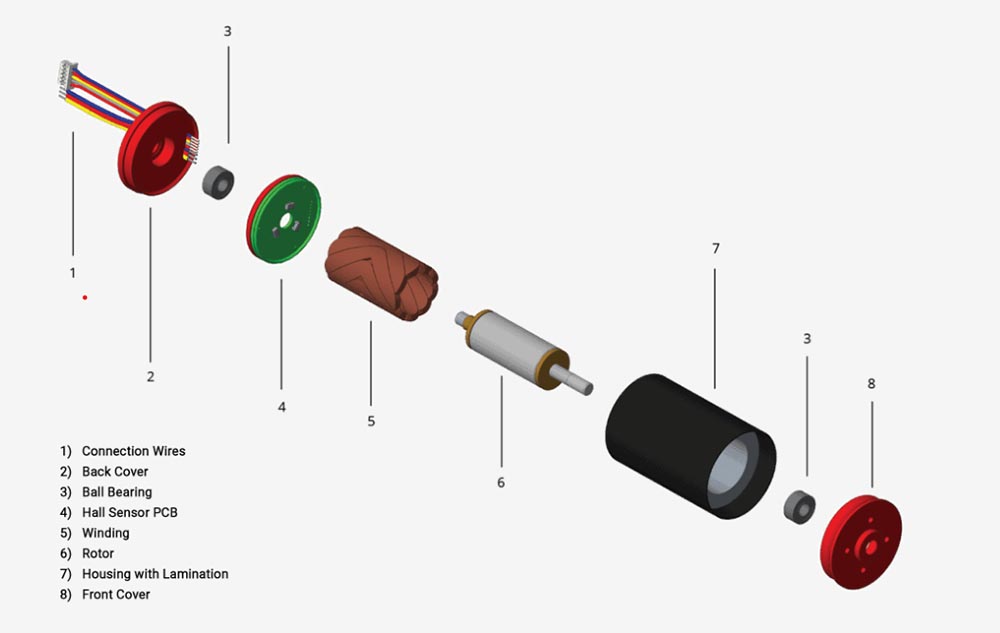
2. Motor bez četkica istosmjerne struje:
Sastoji se od rotora sa permanentnim magnetom, statora sa višepolnim namotajem, senzora položaja i tako dalje. Bezčetkni DC motor karakteriše to što nema četkice i koristi poluprovodničke prekidačke uređaje (kao što su Hall elementi) za ostvarivanje elektronske komutacije, odnosno elektronski prekidački uređaji se koriste za zamjenu tradicionalnih kontaktnih komutatora i četkica. Ima prednosti visoke pouzdanosti, bez varnica komutacije i niske mehaničke buke.
Senzor položaja komutira struju namotaja statora određenim redoslijedom prema promjeni položaja rotora (tj. detektira položaj magnetskog pola rotora u odnosu na namotaj statora i generira signal osjetljivosti položaja na određenom položaju, koji se obrađuje u krugu za pretvorbu signala, a zatim uklanja. Upravlja krugom prekidača napajanja i prebacuje struju namotaja prema određenom logičkom odnosu).

2. Motor bez četkica istosmjerne struje:
Sastoji se od rotora sa permanentnim magnetom, statora sa višepolnim namotajem, senzora položaja i tako dalje. Bezčetkni DC motor karakteriše to što nema četkice i koristi poluprovodničke prekidačke uređaje (kao što su Hall elementi) za ostvarivanje elektronske komutacije, odnosno elektronski prekidački uređaji se koriste za zamjenu tradicionalnih kontaktnih komutatora i četkica. Ima prednosti visoke pouzdanosti, bez varnica komutacije i niske mehaničke buke.
Senzor položaja komutira struju namotaja statora određenim redoslijedom prema promjeni položaja rotora (tj. detektira položaj magnetskog pola rotora u odnosu na namotaj statora i generira signal osjetljivosti položaja na određenom položaju, koji se obrađuje u krugu za pretvorbu signala, a zatim uklanja. Upravlja krugom prekidača napajanja i prebacuje struju namotaja prema određenom logičkom odnosu).
3. Brzi motor bez četkica sa permanentnim magnetom:
Sastoji se od jezgre statora, magnetskog čeličnog rotora, sunčanog zupčanika, spojke za usporavanje, kućišta glavčine i tako dalje. Hall senzor se može montirati na poklopac motora za mjerenje brzine.
Poređenje motora sa četkicama i motora bez četkica
Razlika u principu elektrifikacije između motora s četkicama i motora bez četkica: Motor s četkicama se mehanički komutira pomoću ugljične četkice i komutatora. Motor bez četkica se elektronski komutira pomoću kontrolera na osnovu indukcijskog signala.
Princip napajanja motora s četkicama i motora bez četkica je drugačiji, a različita je i njihova unutrašnja struktura. Kod motora s glavčinom, izlazni način obrtnog momenta motora (da li se usporava mehanizmom za smanjenje zupčanika) je drugačiji, a različita je i njegova mehanička struktura.
bezjezgreni četkani istosmjerni motor
bezjezgreni bezčetkni istosmjerni motor
Vrijeme objave: 03.06.2019.